





GAMES103课程主页:GAMES103:基于物理的计算机动画入门 - 计算机图形学与混合现实研讨会
上一篇:GAMES103笔记 Lecture5 基于物理的布料模拟(Physics-based Cloth Simulation)
下一篇:GAMES103笔记 Lecture 7、8 有限元方法(Finite Element Method)
笔者第一次学习计算机图形学的物理部分,笔记中可能存在错误和解释不清的地方,欢迎大佬以及和我一样的萌新来多多交流讨论,对于错误的部分希望能毫不留情的指正。
上一讲介绍的布料模拟方法依据能量或力来更新质点的位置,本讲介绍的方法从用数学的方法出发来更新弹簧两端的位置,称为基于约束的方法,包括 Position Based Dynamics (PBD), Projective Dynamics (PD) 和 Constrained Dynamics 方法。
投影操作

真实世界中的布料拉伸超过一定程度后,对拉伸具有很强的抵抗。
基于胡克定律的弹簧模型中需要增大弹性系数k来模拟这种现象,但这会造成显示积分和隐式积分都出现问题,增大了模拟的计算量。
基于约束的方法被提出时的动机就是想要解决这个问题。
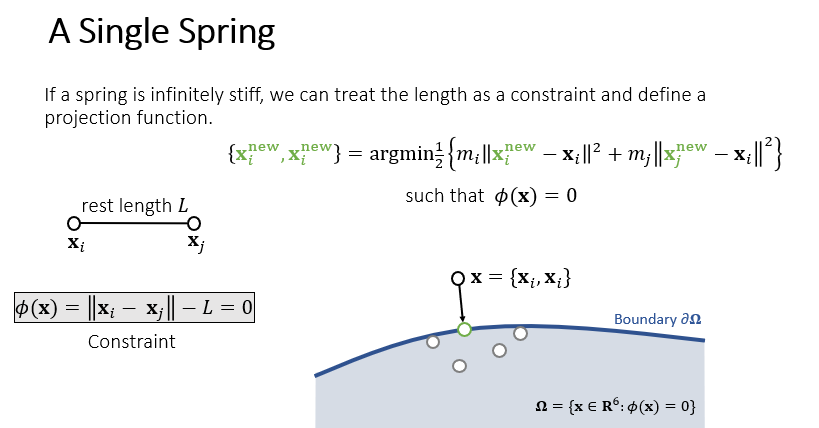
先考虑只有一个弹簧的情况,假设弹簧的弹性系数无限大,那么弹簧的长度就成了一个约束,即弹簧的形变量 ,右图中 是满足这个约束的空间。
当约束被破坏时, 在 外,我们做一个投影操作把 以最近的距离移动到 的边界上使弹簧恢复原长。
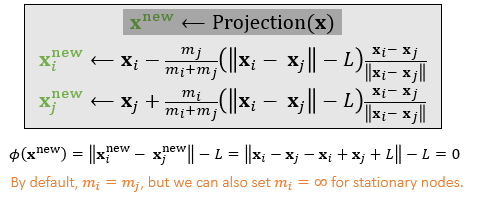
得到更新公式。
其中 是端点的质量,默认情况下两端质量相同,拉伸后两个端点都向着中心点移动,如果希望让其中一个端点被固定住不动,只需要把那个端点的质量设为无限大。
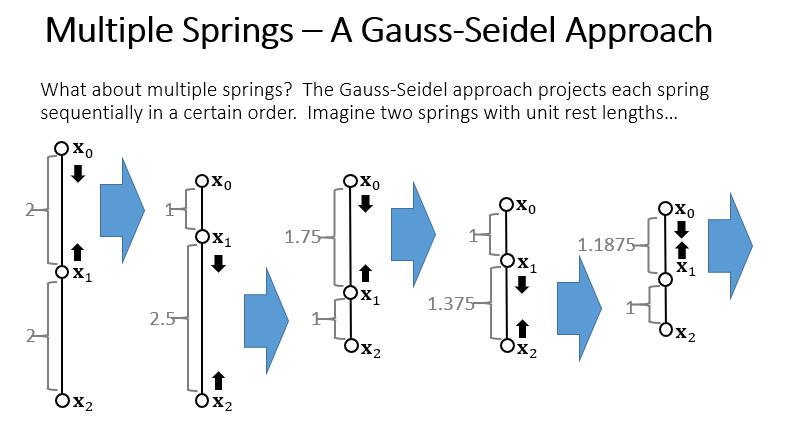
存在多个弹簧时,Gauss-Seidel 方法反复循环处理多个弹簧。
上图两个弹簧的原长都是1,在某一时刻两个弹簧的长度都被拉伸为2。先用刚才的投影操作处理上面的弹簧,上面的弹簧恢复长度1,下面的弹簧长度被拉伸到2.5。再处理下面的弹簧,下面弹簧恢复原长,上面的弹簧又被拉长,再处理上面的弹簧……这样迭代下去两个弹簧的长度都收敛到1。(我觉得这里的迭代操作类似于多个骨骼的 IK 操作)
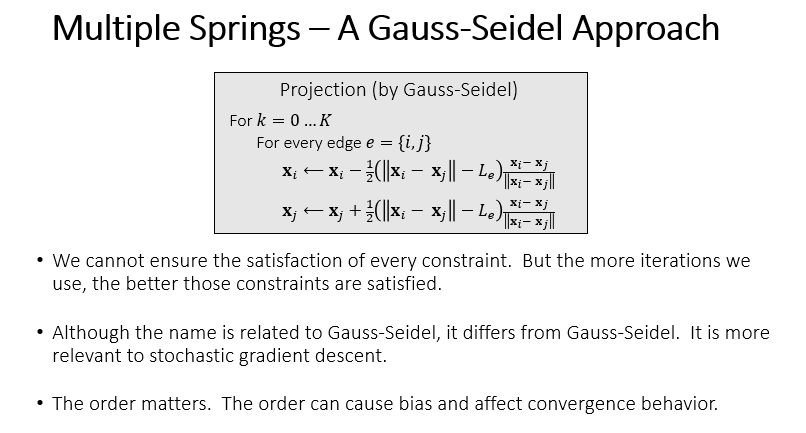
迭代次数越多,就能更好地满足所有弹簧的约束。
Gauss-Seidel 方法虽然名字叫 Gauss-Seidel,但与数学中的 Gauss-Seidel 其实不一样,实际所做的操作更接近于随机梯度下降算法。
Gauss-Seidel 方法中处理边的顺序很重要,可能会造成 bias 问题(整个布料歪向一边),也可能影响算法收敛的速度。

Jacobi 方法先遍历所有弹簧,把每个点受到多个弹簧影响的位置更新量累加起来取平均值,再用平均值更新弹簧的位置。
Jacobi 方法没有偏向性,不存在 bias 问题。容易并行计算。
收敛速度略慢于 Gauss-Seidel 方法。
PBD (Position Based Dynamics)
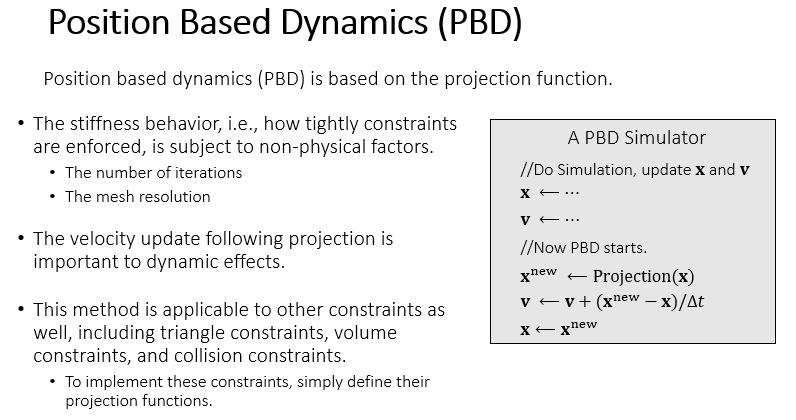
PBD方法的整体流程与 Shape Matching 类似。如右图所示,先假装不存在弹簧,自由地更新每个顶点的位置,然后用投影的方法让顶点满足弹簧的约束,更新顶点位置的同时也给顶点加上速度。
PBD方法中不存在物理中弹性系数的概念,布料表现出的弹性与迭代次数和 Mesh 的分辨率有关。
迭代次数多,布料的弹性就小(弹力大,不能被拉伸),迭代次数少,布料的弹性就大(弹力小,可以被拉伸)。
Mesh 的分辨率小,只需要少量迭代位置就收敛了。所以 Mesh 分辨率小布料的弹性就小,Mesh 分辨率大布料的弹性也大。
PBD 方法的优点:容易实现,容易并行,对内存的访问少(只需要更新顶点),被广泛用在游戏引擎和仿真软件中,Nvidia 的 PhysX 物理引擎也采用了 PBD 方法。在低分辨率模型上运行速度快,对不到 1000 个点的网格可以做到实时模拟。
PBD方法的缺点:不符合物理规律,弹性与网格的分辨率和迭代次数有关。无法得到精确解,迭代次数多反而会产生 Locking 问题让布料无法被拉伸。在高分辨率网格上运算效率明显下降。
分层的方法(类似HLOD)可以让 PBD 方法应用在高分辨率网格上,但是会造成一些其他问题。Chebyshev 等加速方法也可以用。
Strain Limiting
Strain 是“应变”,指物体局部的相对变形。
应变在力学中定义为一微小材料元素承受应力时所产生的变形强度(或简称为单位长度变形量)

Strain Limiting 方法可以被认为是对 PBD 的一个改进。
与 PBD 方法的区别在于做投影前 Strain Limiting 方法不只是模拟一个简单的粒子系统,这个步骤中也可以加入弹簧等模型,最后的投影只是一个纠错步骤,保证模拟的稳定性。
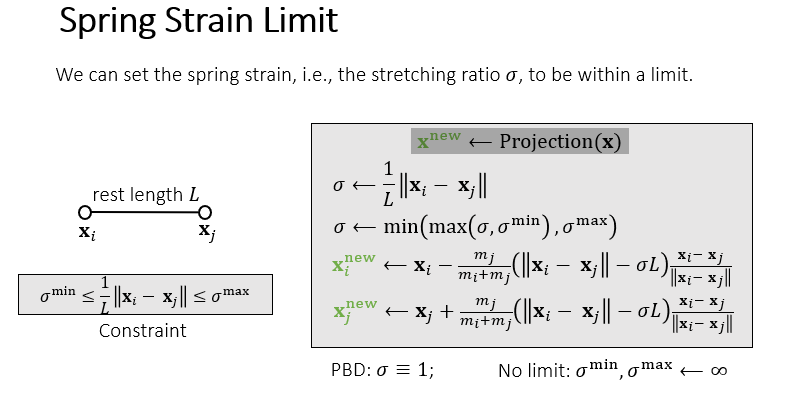
相对的,可以放宽约束条件,投影时不需要让弹簧回到原长,只要回到与原长接近的一定范围内即可。
公式中的 代表弹簧的形变量。
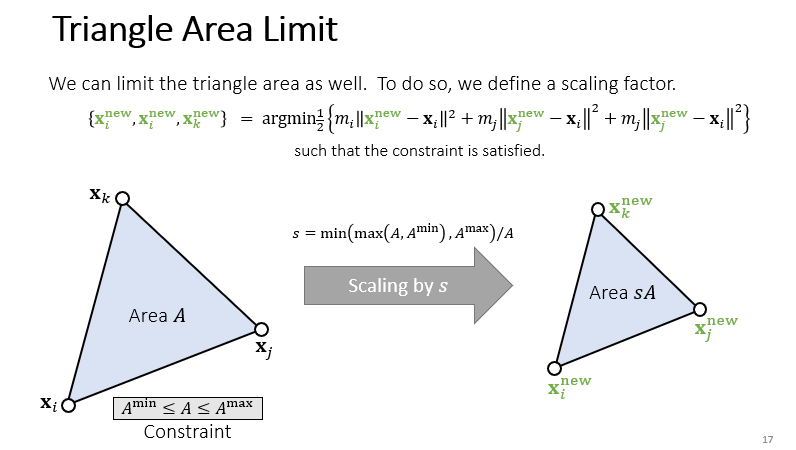
Strain Limiting 方法也可以应用到二维和三维图形上。
这是一个约束三角形面积的例子,当三角的面积超出了约束范围时,直接对三角形进行缩放使面积满足约束。

s 是缩放比。 是质心位置,缩放时质心的位置不变。
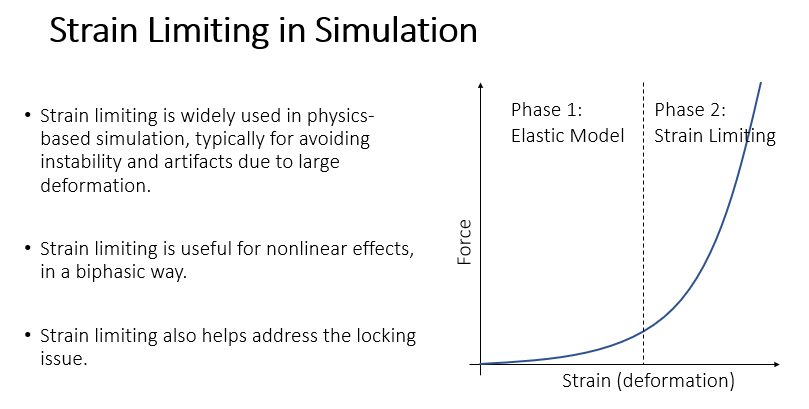
Strain Limiting 方法被广泛用于基于物理的模拟中。很多物体的力与形变量之间存在非线性关系,发生大形变时的表现和小形变时表现出不同的行为,只用一种模型模拟往往会存在数值不稳定的问题,Strain Limiting 方法等同于将形变量分为两段分别进行处理。
Strain Limiting 方法有助于解决 locking issue。因为使用 Strain Limiting 方法后可以在形变量小时使用较小的弹性系数 k,而 locking issue 在 k 较大时比较严重。
PD (Projective Dynamics)
PD 方法和 PBD 一样从约束出发,但根据投影满足约束的操作定义出了能量,之后依然用隐式积分的方法来做模拟。
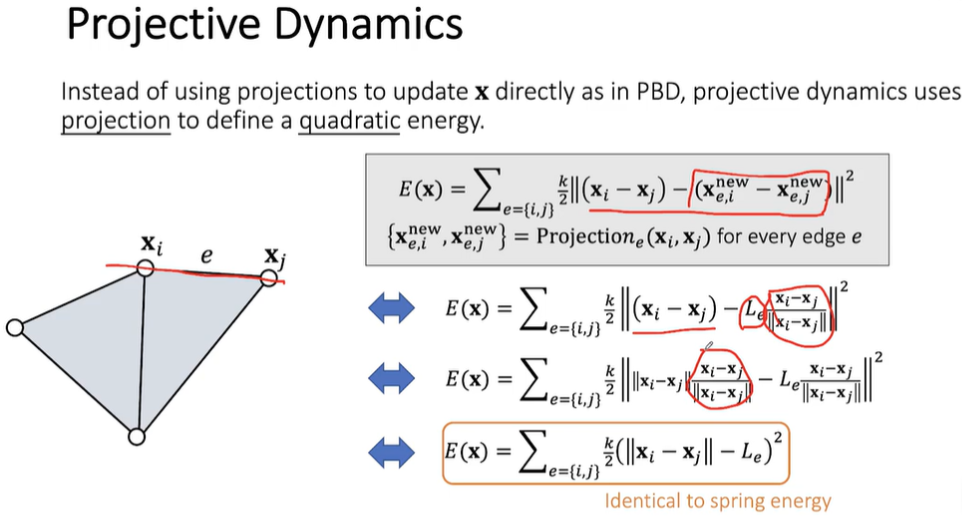
PD 定义的能量其实和之前弹簧模型的能量一模一样,只是换用投影后的新位置来表示。
上图等价公式推导第一步中, 一定在弹簧原来的方向上且长度等于弹簧原长,所以替换成 。
第三步把 提到求长度的括号外面,又因为其长度为1所以直接去掉。
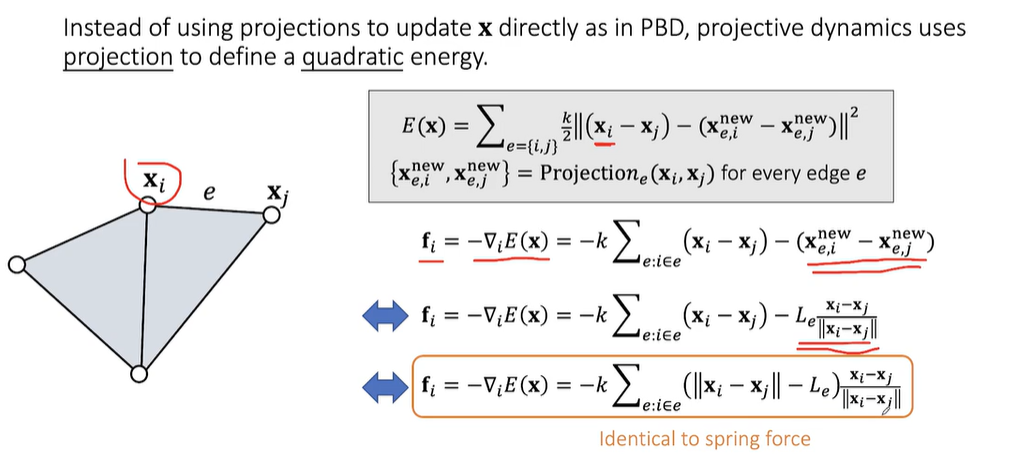
对 求梯度得到顶点 i 处的弹力。
假设 和 与 无关,求得弹力也与弹簧的弹力一致。

求 Hessian 时 PD 方法才出现和原始的物理模拟方法的区别。
依然假设 和 与 无关,求得的 Hessian 具有非常简单的形式,且为常数矩阵。
这是 PD 方法最大的好处。

模拟的总体步骤和隐式积分一样,区别只在于前面多了一步计算投影的位置,以及使用的 Hessian 矩阵不一样。
由于迭代时 左边是个常数矩阵,用 LU 分解这样的直接法来解线性系统时就只用分解一次,减少了大部分开销。
PD 法也相当于用了一个常数矩阵近似替代隐式积分的 Hessian 简化计算。
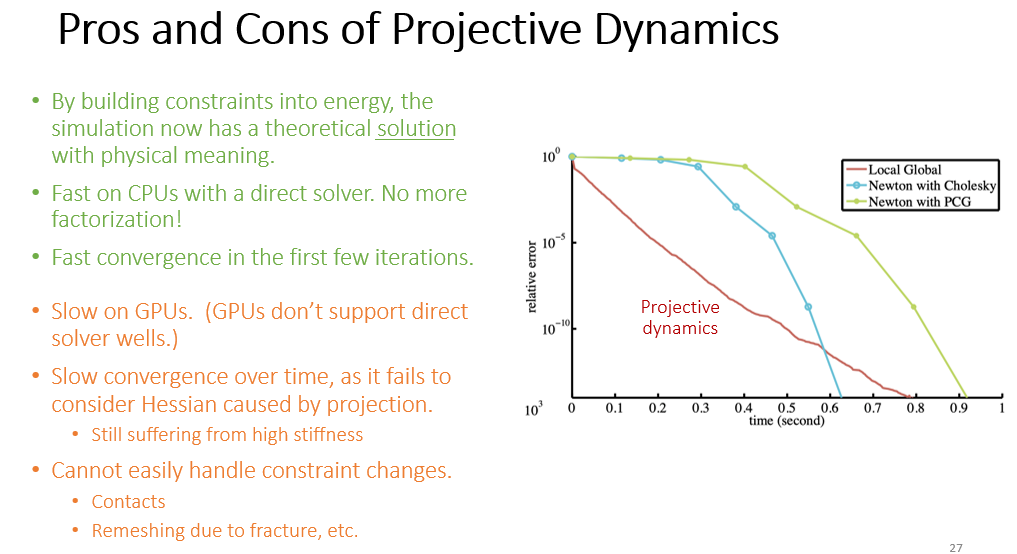
PD 的优点:
- 相对于 PBD,有物理量的定义
- 只需要一次 LU 分解,在 CPU 上效率高
- 如图所示,相对于隐式积分法,PD 前期的计算效率高
PD 的缺点:
- 在 GPU 上慢,因为 GPU 不支持直接法求解线性系统
- 后期的收敛速度不如牛顿法
- 不好处理约束改变的情况
Constrained Dynamics
Constrained Dynamics 方法提出的动机:PBD 方法要做到严格约束弹簧顶点的位置需要很多次迭代。
Constrained Dynamics 可用于用铰链连接的刚体模拟,例如人体骨骼,模拟人体的时候不希望关节之间被拉伸。
Constrained Dynamics 方法的能量公式和隐式积分法相同。

Constrained Dynamics 方法的能量公式和隐式积分法相同。
把约束 代进 改写成二次型的形式得到
其中 ,称为柔度矩阵(Compliant matrix),因为 是弹簧劲度系数的倒数所以反应柔度。
求梯度得到力的新形式
其中 是约束的 Jacobian 矩阵,

把隐式积分更新公式写成动量形式有
同时
合写成矩阵形式得到
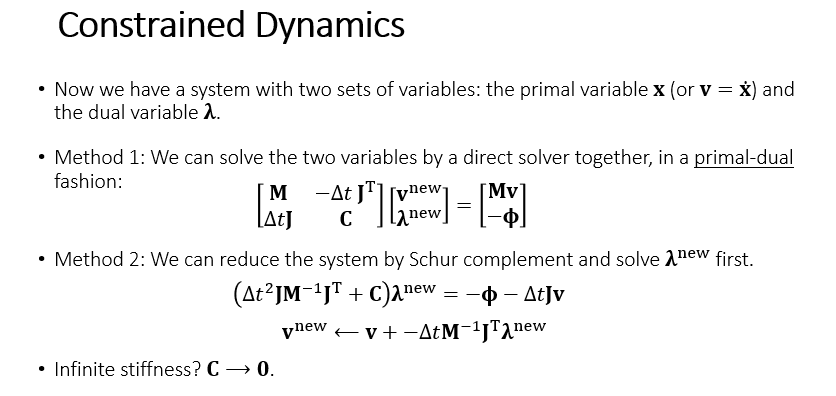
以上推导过程其实没有引入新的关系,只是更换了方程的写法。
称 为主变量, 为 的对偶变量。
写成这样的形式,好处在于如果把 消去先求 ,得到
劲度 k 越大, 越小,反而更容易求解。模拟劲度无穷大的弹簧只需要让
也可以不消元直接解线性系统
具体处理时两种方法都要注意考虑左边的矩阵是否好求、是否稀疏。
游戏中角色死亡时常用的 Ragdoll Animation(布娃娃动画)可以利用 Constrained Dynamics 方法来实现。
总结
本讲介绍了三种基于约束的方法 PBD, PD 和 Constrained Dynamics,它们都从让弹簧断点满足约束的角度出发。
PBD 直接做投影操作让端点满足约束,不存在能量和力这样的物理量。存在多个弹簧时 PBD 需要多次迭代让多个弹簧都接近满足约束条件的状态。弹簧数越少、迭代次数越多,弹簧的劲度就显得越大。
Strain Limiting 方法先做完一般的物理模拟后再做 PBD 的模拟操作,相当于分成两段处理了物体形变在不同区间的情况,这个思路对任何存在形变的物体都通用,所以 Strain Limiting 被广泛用于基于物理的模拟中。
PD 从投影操作定出了能量,得到的能量和力都与隐式积分法相同,但 Hessian 矩阵不同,可以看作隐式积分的简化版。
Constrained Dynamics 在隐式积分中引入了对偶变量便于模拟劲度 k 较大的情况。
相关论文
Muller. 2008. Hierarchical Position Based Dynamics. VRIPHYS.
Bouaziz et al. 2014. Projective Dynamics: Fusing Constraint Projections for Fast Simulation. TOG (SIGGRAPH).
Tournier et al. 2015. Stable Constrained Dynamics. TOG (SIGGRAPH).
上一篇:GAMES103笔记 Lecture5 基于物理的布料模拟(Physics-based Cloth Simulation)